Настольная книга по
проектированию парапланов
Глава 4. Продольная
балансировка
4.1
Введение и определения
4.2
Уравнения статической
балансировки
4.2.1 Сумма моментов равна
нулю
4.2.2 Сумма вертикальных сила
равна нулю
4.2.3 Сумма горизонтальных сила
равна нулю
4.3. Решение системы уравнений
4.4.
Таблица
4.5. Упрощенный метод
балансировки
4.6. Эмпирические
методы
1.
Введение и определения
Точный расчет балансировки крыла в
полете - одна из важнейших задач
конструктора парапланов. Эта глава
раскроет детали расчета балансировки на
основе двухмерного анализа. Также будет
предложен упрощенный вариант расчета, а
также эмпирический метод.
Продольная балансировка параплана
определяется из условия 2D равновесия, см
рисунок ниже. Этот метод основан на
работах [2] и [3],
используя те же
обозначения.
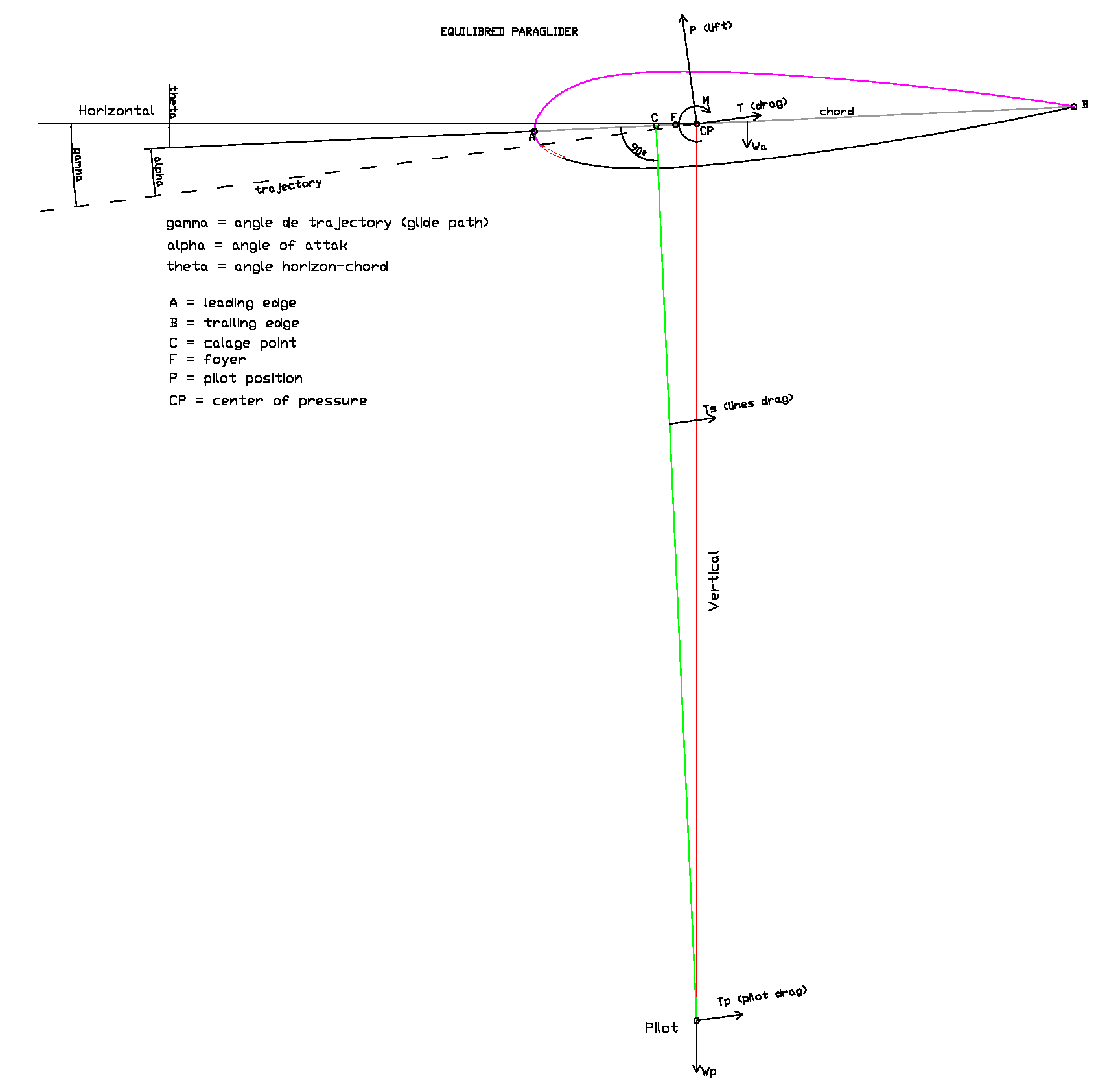
Рис. 4.1:
Продольная балансировка (щелкните чтобы
увеличить).
Силы, точки, углы и
длины, изображенные на рисунке. Вектора
представлены жирным шрифтом.
Силы:
P= подъемная
T= сопротивление
M= момент аэродинамических
сил
Ts= сопротивление строп
Tp= сопротивление
пилота
Wp = вес пилота
Wa = вес крыла
Точки:
A = передняя кромка
B = задня кромка
Cp = центр давления
(суммарное место приложения всех
аэродинамических сил)
P = положение пилота
C = центральная
точка
F = аэродинамический
фокус
Ga = центр тяжести
крыла
Углы:
γ = угол
планирования
θ = угол между горизонтом
и хордой
α = угол атаки (AoA)
Длины:
L = длина строп
dist(A,B)= l
dist(A,Cp) = δ
dist(A,C) = σ
dist(Cp,C) = ε
Понимание каждого элемента важно для
понимания балансировки параплана.
Параплан представляется средним профилем,
который заменяет собой все профили в
параплане. Геометрия и характеристики
этого профиля представляют собой все крыло
с некоторой точностью. Это упрощает
модель.
Силы P, T, и момент M, который является
результатом всех аэродинамических сил,
действующих на профиль, приложены к точке
центра давления Cp. Значения
аэродинамических коэффициентов Cz, Cx, Cm,
соответствующие разным углам атаки α,
могут быть рассчитаны численным методом
например в программе XFOIL.
Силы Ts и Tp зависят от типа
строповки (диаметры, длины) и от позиции
пилота в подвесной системе.
Wp и Wa прикладываются к
центрам масс пилота и крыла и должны быть
сбалансированы с центром давления Cp
крыла.
Средняя точка C
является пересечением хорды и
перпендикулярной линии, проведенной к ней
от позиции пилота P. AC - важное расстояние,
так как оно определяет длину строп и
поведение крыла. Наша цель - найти
примерноое положение средней точки С.
Точка фокуса F не относится напрямую к
расчету балансировки крыла в полете, но
знание ее положения важно для определения
будет ли профиль устойчивым или
неустойчивым. Определение фокуса не
простое, может быть выполнено следующим
образом: точка на хорде, отстоящая от
момента, создаваемого коэффициентом
подъемной силы (Cz) уравновешивает (равна по
величине и обратна по направлению)
аэродинамическому моменту Cm. Таким
образом, расстояние между фокусом F и
центром давления Cp, умноженные на
коэффициент подъемной силы Cz, равно Cm. Для
практических целей достаточно знать, что
фокус лежит на 25% хорды в большинстве
профилей.
Угол планирования γ это
угол между горизонтом и линией движения.
Угол θ это угол между
горизонтом и хордой профиля.
Угол α это угол атаки (AoA)
между хордой и набегающим потоком
(направлением движения).
2.
Уравнения статической
балансировки
В установившемся полете
должны выполняться три основных уравнения
балансировки в двухмерной плоскости:
Σ M= 0 Сумма моментов равна
нулю.
Σ V= 0 Сумма вертикальных сил
равна нулю.
Σ H= 0 Сумма горизонтальных сил
равна нулю.
2.1 Сумма
моментов равна нулю.
Σ M= 0
Используем момент
относительно точки на передней кромке
A
MA(P) + MA(T) + MA(Ts) + MA(Tp) + MA(Wp) + MA(Wa) + M= 0
(1) + (2) + (3) + (4) + (5) + (6) + (7) =
0
Моменты положительные, если
направлены против часовой стрелки.
Проанализируем каждый из них:
(1) = q0* Cz * δ
* cos (α)
q0 = (1/2)
* ρ * S * V2 динамическое давление, где
ρ плотность воздуха, S площадь крыла, V
скорость полета
P= k* Cz , где Cz коэффициент
подъемной силы и k - единичный вектор,
ортогональный траектории движения
(2) = q0* Cxa * δ
* sin (α)
T= i* Cxa , где Cxa коэффициент
сопротивления и i - единичный вектор вдоль
тректории
Cxa = Cxoa + Cxi
где Cxoa сопротивление формы
и трения крыла
Cxi индуктивное
сопротивление Cxi=Cz2(α)/(π *
λ * e)
λ = b2/ S удлинение, b размах и S
площадь крыла
e ≈ 0.9 Oswald
коэфф.
(3) = (L/3) * Ts * cos (α) + σ * Ts * sin (α) =
q0 *Cxs
* ((L/3) * cos (α) + σ * sin (α)
)
где Ts = q0 *Cxs
сопротивление строп
(4) = q0
*Cxp * (L *
cos (α) + σ * sin (α) )
где Tp = q0 *Cxp
сопротивление пилота и подвески
(5) = - mp* g * ( L
* sin (θ) + σ * cos (θ) )
Wp = mp* g
сила тяжести пилота, g=9.81 m/s2
(6) = - (l/3) * ma* g * cos
(θ)
Wa = ma* g
центр тяжести крыла в одной трети хорды
(l/3)
(7) = - q0
*Cm
аэродинамический момент
Произведя замены, уравнение
балансировки становится:
q0* Cz * δ
* cos (α) +
q0* Cxa * δ
* sin (α) +
q0
*Cxs
* ((L/3) * cos (α) + σ * sin (α) )
+
q0
*Cxp * (L *
cos (α) + σ * sin (α) ) +
- mp* g * ( L
* sin (θ) + σ * cos (θ) ) +
- (l/3) * ma* g * cos
(θ) +
- q0
*Cm = 0
2.2 Сумма
вертикальных сила равна нулю.
Положительное направление -
направление силы тяжести.
Σ V= 0
mp* g +
ma* g +
- q0* Cz * cos
(γ) - q0* Cxa * sin (γ) +
- q0* Cxs *
sin (γ) - q0* Cxp * sin (γ) = 0
тогда,
g * (mp
+ ma) -
q0* ( Cz * cos (γ) + ( Cxa + Cxs + Cxp) * sin (γ) )
= 0
Cxa + Cxs + Cxp = CxT общий
коэффициент сопротивления
g * ( mp
+ ma) -
q0* ( Cz * cos (γ) + ( CxT) * sin (γ) ) = 0
2.3 Сумма
горизонтальных сил равна нулю.
Положительная ось идет
слева направо.
Σ H= 0
q0* Cxa *
cos (γ) + q0* Cxs * cos (γ) + q0* Cxp *
cos (γ) - q0* Cz * sin (γ) = 0
тогда,
CxT * cos (γ) = Cz * sin
(γ)
или,
tan (γ) = CxT / Cz
Аэродинамическое качество
К= 1 / tan (γ) по
определению
тогда GR = Cz / CxT
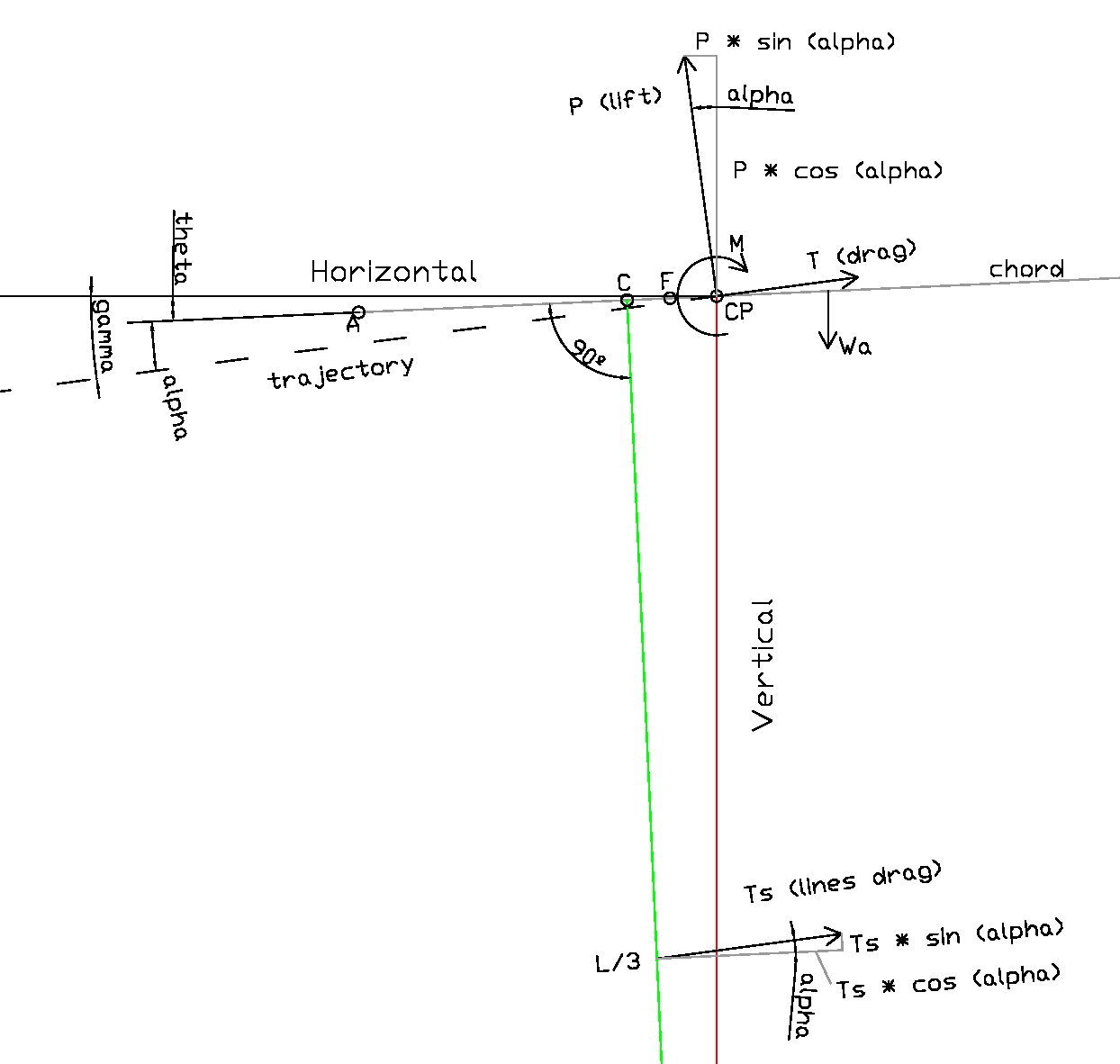
Графические
пояснения:

Рис. 2: Примечание
1
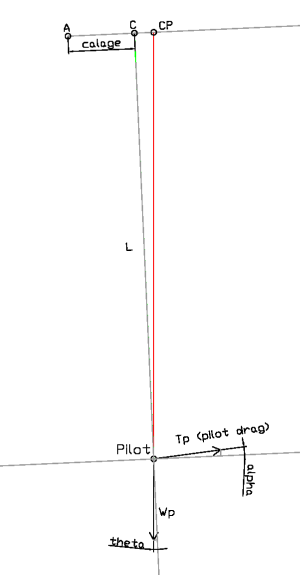
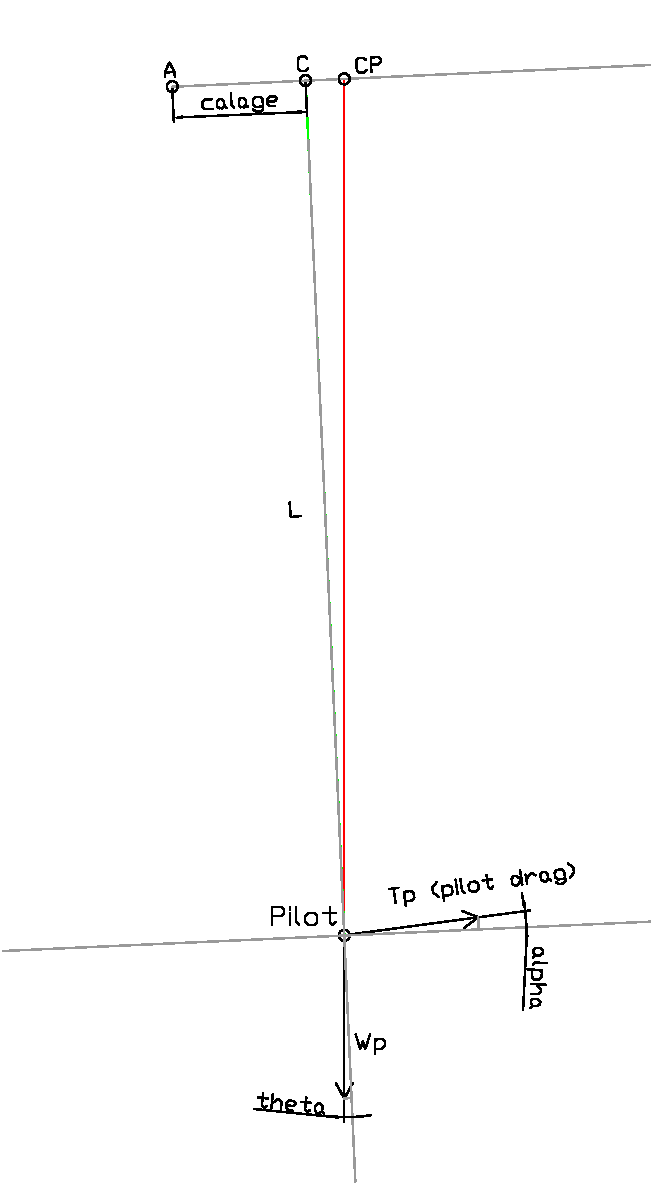
Рис.. 3: Примечание
2
3.
Решение системы уравнений
Уравнения балансировки
(равновесия):
[1]
q0* Cz * δ
* cos (α) +
q0* Cxa * δ
* sin (α) +
q0
*Cxs
* ((L/3) * cos (α) + σ * sin (α) )
+
q0
*Cxp * (L *
cos (α) + σ * sin (α) ) +
- mp* g * ( L
* sin (θ) + σ * cos (θ) ) +
- (l/3) * ma* g * cos
(θ) +
- q0
*Cm =
0
[2] g * ( mp +
ma) - q0* ( Cz *
cos (γ) + ( CxT) * sin (γ) ) = 0
[3] tan (γ) = CxT / Cz
Далее:
[4] q0 = (1/2) * ρ * S * V2
[5] Cxa = Cxoa + Cxi
[6] Cxi=Cz2(α)/(π *
λ * e)
[7] λ = b2/ S
[8] CxT = Cxa + Cxs + Cxp
[9] Cxa = Cxoa + Cxi
[10] γ = α + θ
[11] GR = Cz / CxT
Аналитическое
решение (в разработке)
(...)
Численный
метод:
Решение системы уравнений может быть
получено аналитически или численно. Мы
используем численный итеративный метод,
основанный на уравнении баланса моментов,
в котором их сумма равна нулю. Цель - найти
комбинацию параметров, соответствующих
уравнению и обеспечивающих заданный угол
планирования.
Переменные в уравнениях
выше представим как:
Входящие данные
ma,
mp, g, e, ρ, S, b, L, l, α
численные приближения
Cxs, Cxp
аэродинамические
значения, рассчитанные численно
Cz, Cx, Cm, Cp
Результаты
V, γ, δ, θ, GR, Cxi, Cxa, CxT,
q0
4. Таблица
Решени уравнений
балансировки
|
| Wing name: |
LAB_exa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Профиль |
Laboratori |
|
|
|
|
|
|
|
| Плошадь |
25.70 |
м2 |
|
|
|
|
|
|
| Размах |
10.25 |
м |
|
|
|
|
|
|
| Хорда |
3.00 |
м |
|
|
|
|
|
|
| Участавующая в
расчете хорда |
3.00 |
м |
|
|
|
|
|
|
| Удлинение |
4.09 |
|
|
|
|
|
|
|
| Длина
строп |
6.00 |
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Масса
пилота |
80.00 |
кг |
|
|
|
|
|
|
| Масса
крыла |
5.00 |
кг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| G |
9.81 |
м/с2 |
|
|
|
|
|
|
| RHO |
1.11 |
|
плотность
воздуха |
|
|
|
|
|
| Oswald |
0.90 |
|
Oswald коэфф. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| CX пилот |
0.015 |
Сопротивление
пилота |
|
|
|
|
|
|
| CX строп |
0.020 |
Сопротивление
строп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Alfa |
5.00 |
градусы |
0.087 |
радианы |
угол полета |
|
|
|
| Cz(alfa) |
0.900 |
Подъемная сила |
|
|
|
|
|
|
| Correcció 3D Cz |
0.624 |
|
|
|
|
|
|
|
| Cz(alfa) correction
3D |
0.562 |
|
|
|
|
|
|
|
| Cx0a(alfa) |
0.009 |
|
|
|
|
|
|
|
| Cm(alfa) |
-0.042 |
|
|
|
|
|
|
|
| Cm0 |
-0.038 |
|
|
|
|
|
|
|
| Alfa0 |
-1.700 |
|
|
|
|
|
|
|
| Cxi(alfa) |
0.070 |
|
|
cxo+ci |
Cxo |
Ci |
Cp |
Cs |
| CxT |
0.114 |
Общее
сопротивление |
100.00% |
69.24% |
7.65% |
61.59% |
13.18% |
17.58% |
|
|
|
|
|
|
|
|
|
| GAMMA(alfa) |
0.200 |
радианы |
11.45 |
градусы |
4.94 |
GR |
(Cz3D) |
|
|
|
|
|
|
8.57 |
GR max |
|
|
| Theta |
0.113 |
радианы |
6.45 |
градусы |
|
|
|
|
| Q0(alfa) |
1455.1 |
|
|
|
|
|
|
|
| V |
10.09 |
м/с |
36.33 |
км/ч |
скорость |
|
|
|
|
|
|
|
|
|
|
|
|
| Bl |
-0.046 |
Cm/Cz |
|
|
|
|
|
|
| Xcp |
0.296 |
Cp (%1 хорды) |
|
|
|
|
|
|
| CP |
0.889 |
Cp положение (м) |
|
|
|
|
|
|
| Calage |
0.433 |
Средняя точка (м) |
|
|
|
|
|
|
| Sigma |
0.144 |
Средняя точка часть
хорды |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Моменты
относительно LE |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| M1= |
-725.02 |
|
Момент RFA |
|
|
|
|
|
| M2= |
-59.08 |
|
Moment строп |
|
|
|
|
|
| M3= |
-131.29 |
|
Момент сопротивления
пилота |
|
|
|
|
|
| M4= |
866.82 |
|
Момент веса
пилота |
|
|
|
|
|
| M5= |
48.74 |
|
Момент веса крыла |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| SUM= |
0.17 |
|
Ноль в уравнении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| FH= |
0 |
|
Ноль в уравнении |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| FV= |
0 |
|
Ноль в уравнении |
|
|
|
|
|
Примечание: Таблица в
процессе заполнения (некоторые детали
требуют корректировки). По завершении
функциональный файл будет доступен для
загрузки в формате .ods .xls.
5. Упрощенный метод балансировки
Более простой
подход, хотя основанный на том же принципе,
описан ниже:
1. Рисуем центральную
секцию крыла в установившемся полете.
2. Параплан летит с неким
аэродинамическим качеством К (ожидаемым от
нашего крыла), которое соответствует углу
γ
| К |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
| Угол γ (град) |
45 |
26.57 |
18.43 |
14.04 |
11.31 |
9.46 |
8.13 |
7.13 |
6.34 |
5.71 |
5.19 |
4.76 |
3. Мы хотим от крыла
получить максимальное аэродинамическое
качество при приемлимой устойчивости к
турбулентности. На большинстве парафойлов
оно достигается на углах атаки от 5 до 10
градусов. Выбираем угол атаки 7-9 градусов.
Если главной целью ставится достижение
максимальной скорости, то выбираем угол
около 5 градусов.
4. Рисуем профиль в
полете. Угол хорды к горизонту равен θ = γ -
α
5. Определяем на рисунке
центр давления Cp для выбранного профиля на
угле атаки α.
6. Определяем положение
пилота P точно под центром давления Cp
(проводим вертикальную линию вниз), на
расстоянии длины строп.
7. От пилота P рисуем
перпендикуляр к хорде для получения средней точки C.
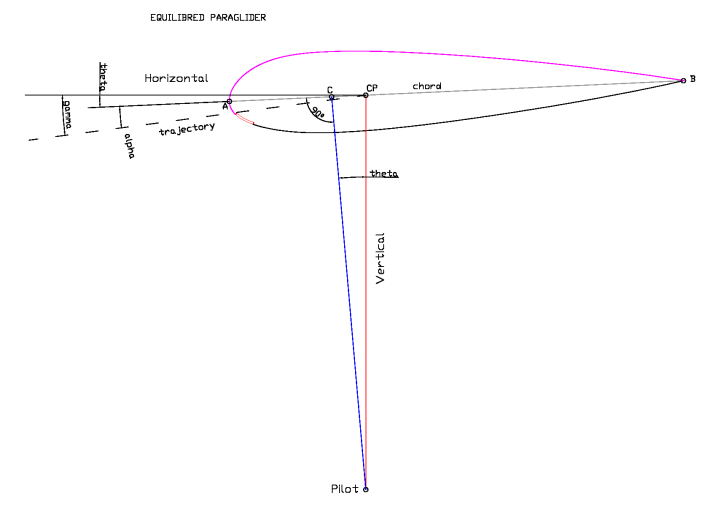
Рис. 4: Упрощенный
метод балансировки
Метод очень прост и
может быть использован для первого
приближения. Недостатком является то, что
мы изначально задаем предположительное
аэродинамическое качество крыла К
(полученное из анализа похожих крыльев,
например) и задаем угол атаки на
максимальном качестве (сложнее для
предсказания). Возможно, потом потребуется
некоторая корректировка длины свободных
концов или строп на прототипе для
определения идеального положения средней
точки С. Тем не менее,
точность этого метода достаточна и он
широко применяется при проектировании
парапланов.
6. Эмпирические методы
Многие конструкторы используют
эмпирические методы, основанные на анализе
предыдущих летавших моделей. Такие методы
просты и эффективны, так как различные
погрешности при изготовлении крыла и не
слишком аэродинамичная форма парапланов
(матрасность), вносят большую погрешность в
итоговый результат. Зачастую большую, чем
погрешность расчета по упрощенному или
эмпирических методам. Поэтому
окончательная настройка стропной системы
всегда делается на готовом прототипе по
результатам продувок на ветру или тестовых
полетов.
Поэтому очень эффективным методом
является изучение профилей и длин строп
существующих парапланов с похожими
характеристиками. Необходимо только
изучить среднюю секцию крыла и графически
определить среднюю точку С, с и без
акселератора.